martinr1000
Active Member
Hi all,
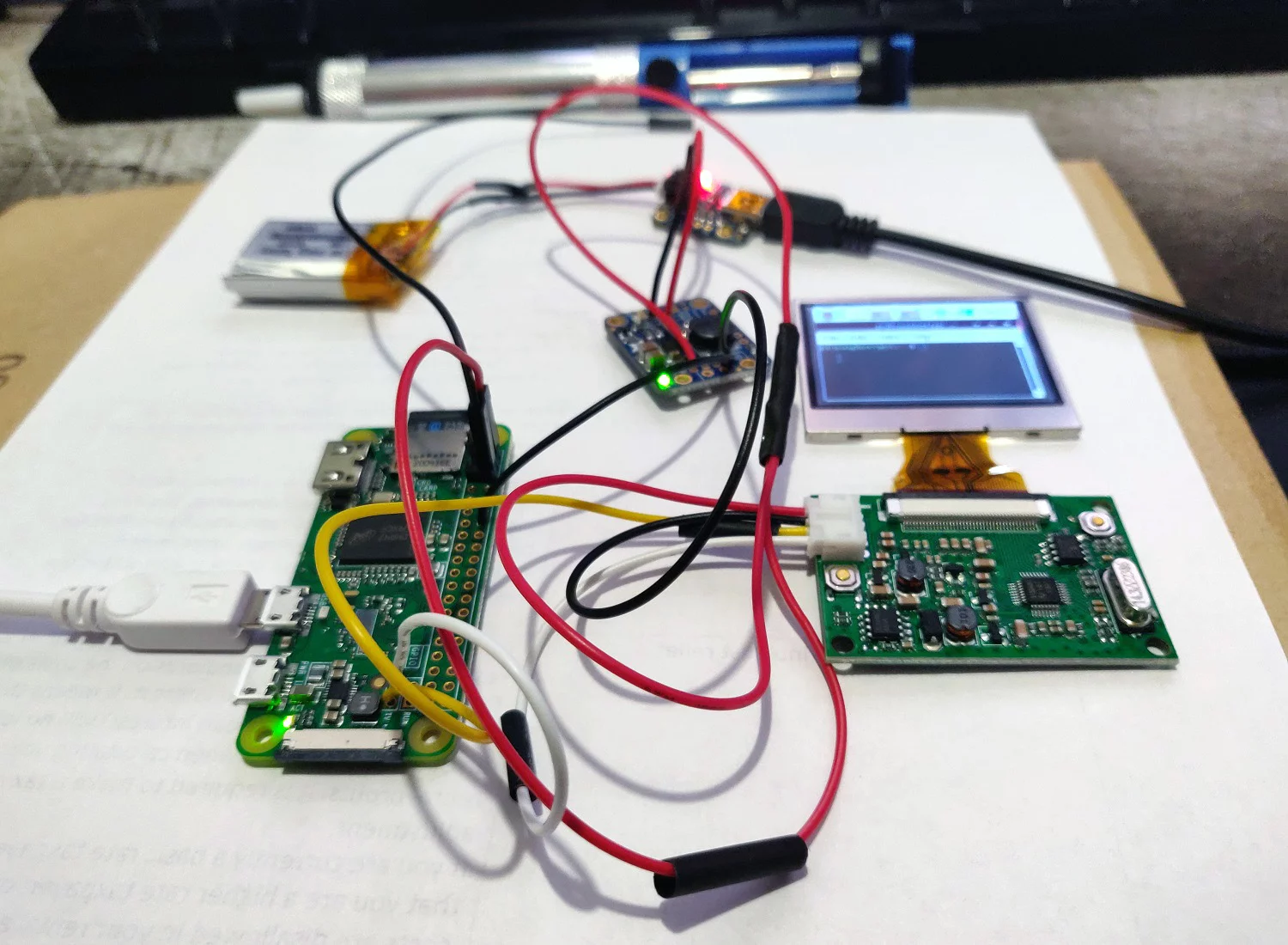
I've been working for a long time now to create a viable motion tracker prop for the raspberry pi. I'm happy enough with my results to share that with you now
https://www.youtube.com/watch?v=UzfXKLisqew&t=67s
The good news is that if you fancy making one I'm sharing the source code and install instructions so that everyone can have a go.
https://github.com/martinr1000/AliensMotionTracker
hope to see some of your builds in the future
I've been working for a long time now to create a viable motion tracker prop for the raspberry pi. I'm happy enough with my results to share that with you now
https://www.youtube.com/watch?v=UzfXKLisqew&t=67s
The good news is that if you fancy making one I'm sharing the source code and install instructions so that everyone can have a go.
https://github.com/martinr1000/AliensMotionTracker
hope to see some of your builds in the future







")